Research
Viability of Vehicle Pathways
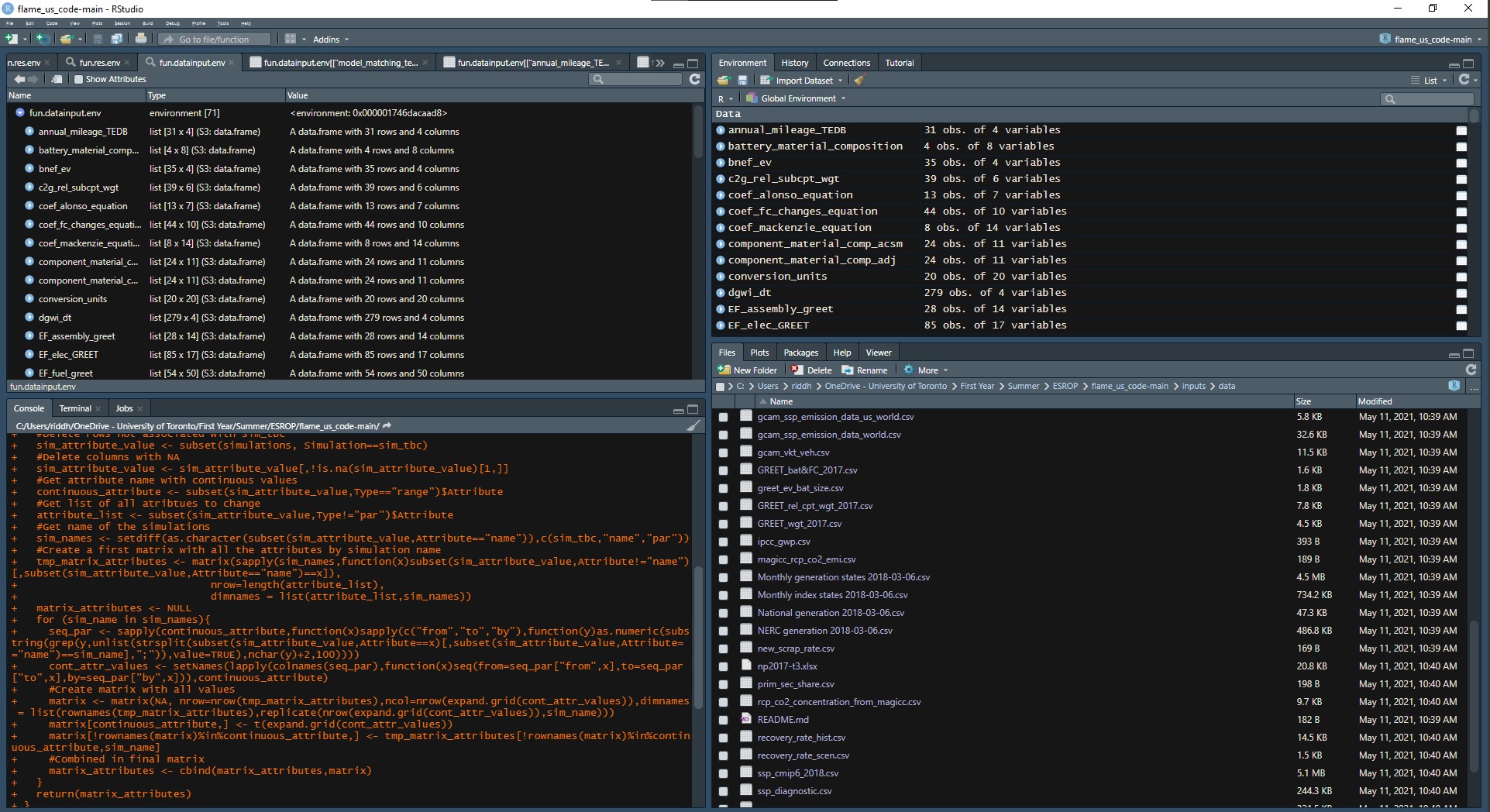
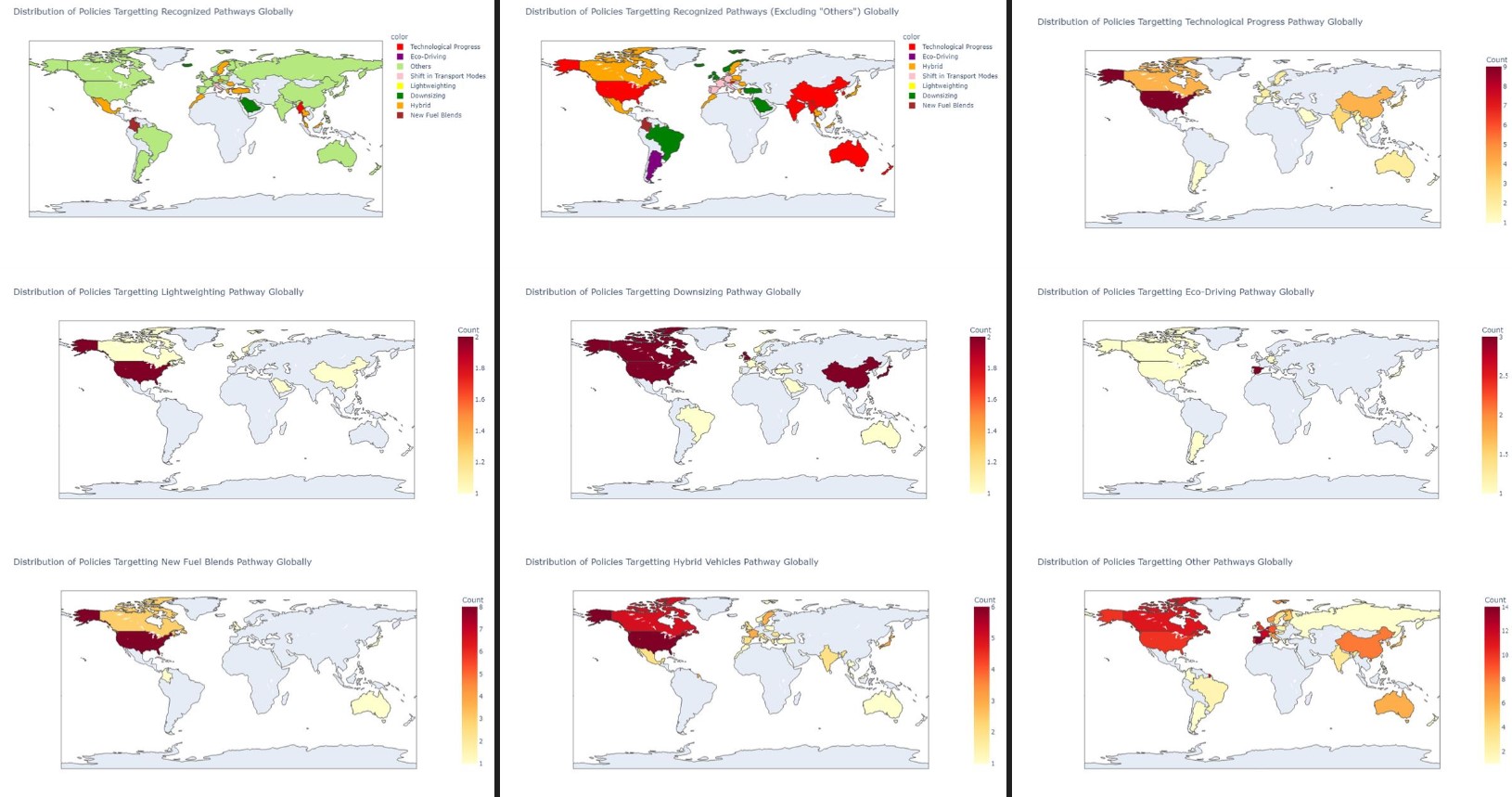
I worked with Professor Posen and post-doctoral researchers in his research group to work on a variety of projects. I initially worked with a post-doctoral researcher to evaluate the best-in-class vehicles for each vehicle class in the US for their tailpipe greenhouse gas emissions, to see how much of a difference just switching to these vehicles can make. Next, I worked with the same researcher to study the feasibility for vehicle greenhouse gas mitigation, answering the question: "Which of these many pathways to mitigate greenhouse gas emissions from internal combustion engines is actually feasible?" My work involved developing and optimizing an automated, multi-threaded webscraper to acquire over 70,000 data points from the IEA Policy Database, reducing runtime from 12 hours to 12 minutes. I then performed statistical analysis on these data, which I gathered into an SQL database and used python to study and generate graphs. This work is now part of a research project and paper.